Boing! MK2 – Design Evaluation Pt2.
Boing! has been progressing, albeit slowly. I’ve mainly been designing baseplates, realising that they’ll bend, designing another one…. you get the picture. It’s been a slow process, and with real life getting in the way once again, there has been no progress on the design of a high flow 5/3 solenoid valve that I am happy to get bashed around.
With that being said, back in Part 1, I quoted: Tank tracks! (Because, in the words of the infamous Ollie Lang – Why F***in’ Not) and that’s largely what I’ve been working on. The design goals here are simplicity, badassery and grip. Although not necessarily in that order. To this end, I’ll first mention the drive system itself, as it’s key to making the tank tracks work and should give Boing! enough oomph to get to a reasonable speed whilst still being able to push around other bots. Although I won’t be winning any drag races (especially against CMIYC), I think I should be able to achieve 15mph without too much bother.
At the advice of Chris, who has stated on multiple occasions that CMIYC is too powerful for it’s own good, I’ve decided to step down the drive motors to the relatively affordable NTM PropDrive 42-48. At just a hair over £22 each, and packing a 1.2Kw punch, it should be enough to propel the robot. At this juncture, I’m not sure if it’ll be enough – although, I don’t want do a burnout on tank tracks – but I’m sure that it will work well enough. 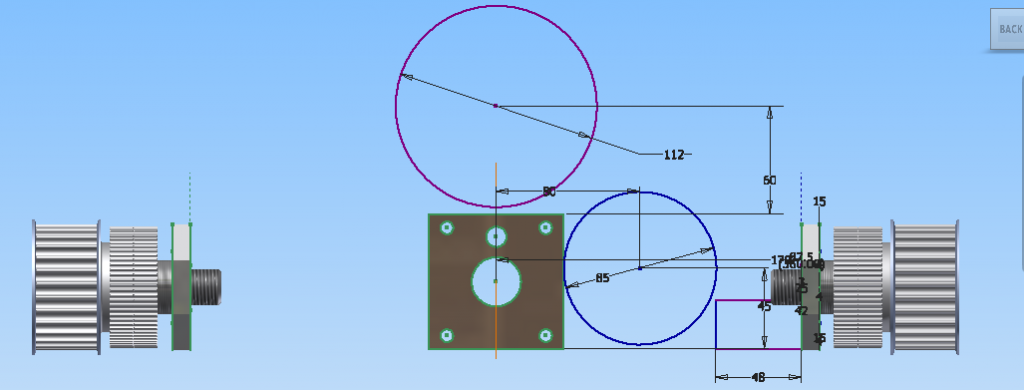
The above image shows where I’m at at the moment – sitting at 515x360x210 (w/l/h), this is a wide robot. The reason for this is threefold. Firstly, I need room to fit all of my stuff. The big circle at the top of the image is the buffer tank, a stainless-steel lined cylinder rated to 300 bar (although it’s only ever going to see 68 bar), and the smaller circle is where the CO2 is stored in a nice, 20oz aluminium tank. By bad maths, 20oz of CO2, stored at 68 bar and used 1.5 liters at a time will get me about 100 hits with the hammer (and 100 to return it) – the 20oz of liquid CO2 is, according to the internet, 311 liters of gas at 21C.
The second reason that Boing! is so wide is a simple one – it looks stable to my mind. I don’t want it to fall over when the hammer flies, and to me, this looks like a nice, wide base. Of course, without some serious modelling, I won’t know until I try it.
Thirdly? It looks cool! How many other tank track hammers are around?
However, I’ll get back to the point of this post – the drive system. I’ll be running a 7.2:1 reduction via HTD3 pulleys. The motors will be running at their maximum of 18.5V – accounting for mechanical losses, that gives me 12000RPM at the motor. The tank tracks themselves will have an outside diameter of 80mm (5mm of tread). Again, taking into account mechanic losses and tread efficiency, a top speed of 14.5MPH shouldn’t be unfeasible against the theoretical top speed of 15.6. The tank tracks themselves will be fairly simple – but I’ll go into more detail about that closer to actually making them.
Now, onto the problem with this drive system and the bot overall – weight. When you add the motors, battery, side plates, cylinders and the piston assembly together, it adds up to a whopping 9.205Kg. I’ve got some serious weight saving to do if I’m going to fit the armour, baseplate, shuttle valve and hammer head into the next 4000 grams.
Until Next Time
-Rob