AWESC2 – A 2 Channel Antweight Brushed ESC
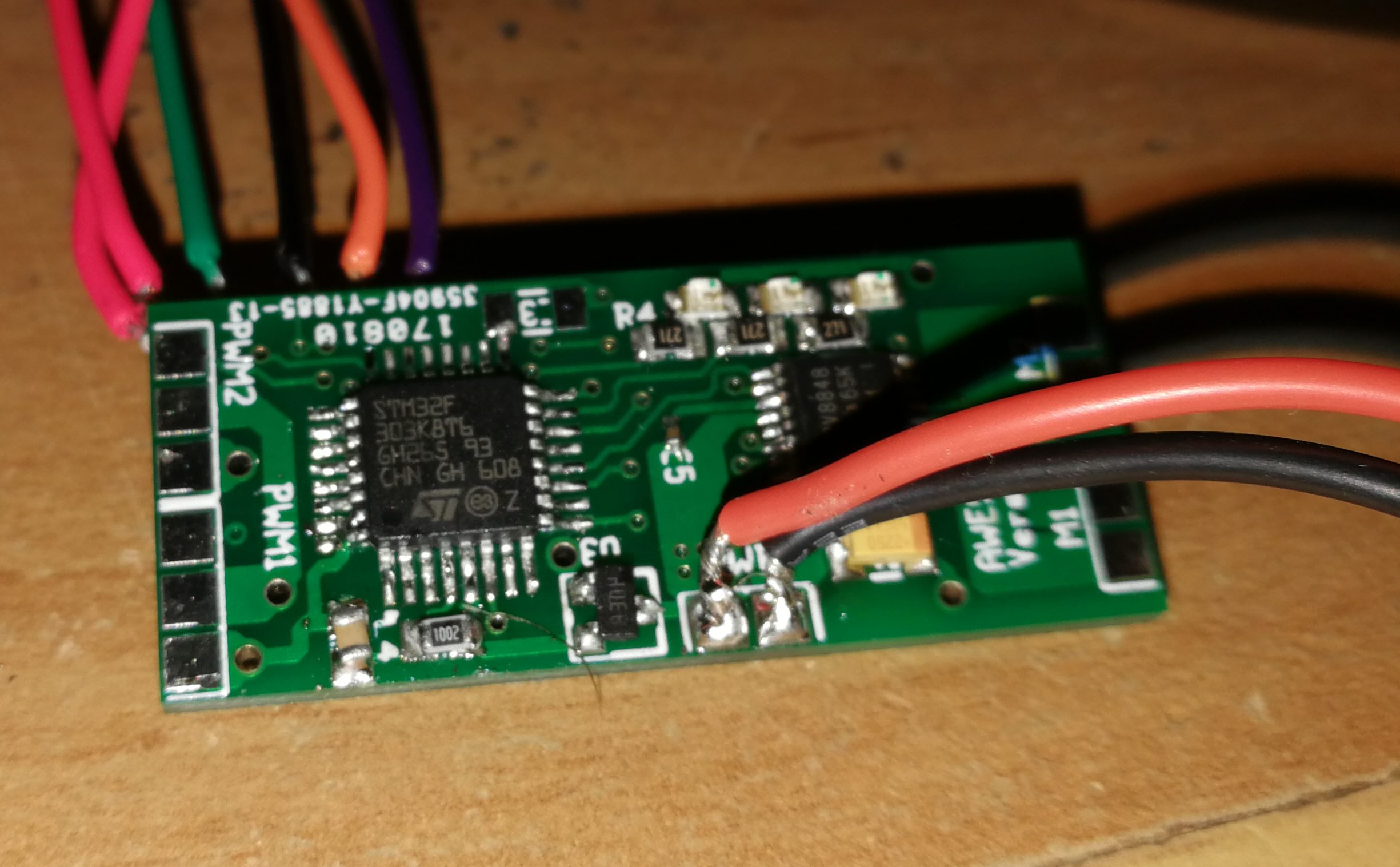
The AWESC, fully assembled – but still connected to its programmer, top left.
First off an apology – this should’ve got posted about 3 weeks back…. but the real world decided to get in the way…..
Part of the fun of doing stuff for combat robotics is solving complex challenges. Antweights present a whole host of complex challenges one of which is finding a speed controller that’s small enough, light enough and capable enough to deliver the necessary performance that is demanded of robotic combat. Credit is very much due to Rory Mangles for producing the NanoTwo kits (LemonRX + 2-channel ESC in single package) and inspiring the crazy idea to design and build a two-channel (brushed) speed controller for the Antweight class. Here at ARC HQ, we don’t believe in doing the sensible and easy thing…. because….. well… why should we? This is combat robotics, and the only way to succeed is to innovate.
There were three main requirements:
- Lightweight (Target was sub-5g, ideally sub-3g)
- Responsive (Power is delivered near-instantly when demanded)
- Simple (These things had to be as easy as possible to assemble and fault-find)
What we’ve ended up with is probably overkill, but it works pretty well. It’s an STM32-based microprocessor running on a 72MHz internal clock, coupled with a DRV8848 dual channel motor driver. Capable of driving two motors with up to 2A of current at up to 12V, the AWESC provides an ideal solution to the challenge of an Antweight speed controller. It weighs in at just shy of 5g, meeting the above criteria.
We’ll be running these in our fleet of antweights as they get built, and if any of the community would like one to try – please give us a shout via our Facebook page, or send Chris an email on chris (at) arc-robotics.org.uk. There are 5 test units that will be available to be handed out to people to try (Note: Assembly isn’t due to complete on this run until end of September).