The 10 week build – Week 1
Over on the Roaming Robots Facebook Page, I’ve been making myself known to some of the awesome roboteers involved in both the live shows and in Robot Wars. As you can (hopefully) see from that post there, work have decided to send me (Chris) on a trip to Manchester to the UK Network Operator’s Forum (UKNOF) 37.
Coincidentally, this falls the same week as the Extreme Robots Live Tour event in Manchester.
Since I posted that on Friday, I’ve had reactions from the “You’re completely insane” to “That’s awesome”, and often a mix of both.
Now… here’s the fun bit. Where do you start? Simple answer: 3D modelling. It doesn’t matter what modelling software you use, within reason, however, it makes life very much easier if your modelling software understands assemblies, parts, and how to export parts as the industry standard “Step files”. That realistically means Solidworks, Autodesk Inventor, or similar. The good news is that if you’re in education, you can just go and get a copy of Inventor (be warned – 25GB+ disk space required) although they do check that you’re at least connected to a University or other academic institute.
Catch Me If You Can – Chris’ Featherweight
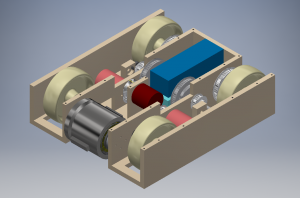
Having spent quite some time getting to grips with various bits of Inventor, including figuring out how to make sections for V-belts, aligning gears, etc, we get the result you see to the right. Well, almost, there’s a few bits that haven’t quite aligned themselves, but by and large, it’s all there.
In short – it’s a shrunken version of Big Dave’s drum assembly – shoved onto what is essentially a two wheel drive (but 4 wheel total) monster. Geared for a speedy 16mph and driven by two brushless motors, there’s a reason this robot got the name it did!
So, that was the whole of Sunday, and Monday night gone. Come Tuesday, we’d finalised the niggles and were ready to order parts. I, pretty much, ordered most of a featherweight robot in a day. The only thing that remains to sort out is the HDPE for the shell (which my friendly local machine shop really doesn’t want me using – but they might have to deal with it).
We’re now Thursday (so effectively day 7), and the bearings should arrive today all being well (last seen somewhere in Parcelforce’s network). I should get the gears and belts tomorrow (although there’s some machine work to be done there) – and then we’ve basically got most of the bits of a robot.
We are slightly cheating with the chassis, as we’re going to build it out of plywood first to check it all fits before we send things off to the machine shop.
The next update will be posted on Thursday, 16th February.